三维激光Lidar点云数据处理服务详解
三维激光Lidar点云数据处理是现代测绘、自动驾驶、城市规划等领域的关键技术。随着高精度三维扫描设备的普及,海量点云数据的高效处理成为行业刚需。本服务专注于提供专业、可靠的点云数据处理解决方案。
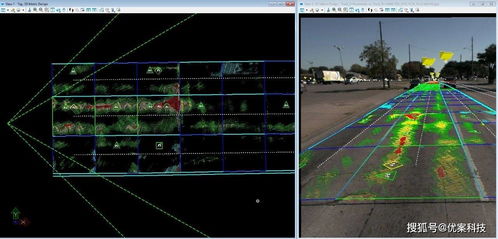
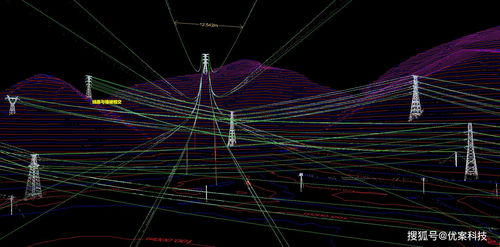
核心技术包括:点云滤波去噪,通过统计分析和空间滤波算法有效剔除异常点;点云配准与融合,采用ICP、特征匹配等方法实现多站点云数据的精确拼接;三维建模与重建,基于点云数据生成高精度网格模型或实体模型;语义分割与分类,运用机器学习技术识别建筑物、植被、道路等地物类型。
应用场景广泛覆盖:智慧城市建设中的地形地貌分析、建筑立面测量;自动驾驶领域的高精地图制作、障碍物检测;文物保护中的数字化存档与修复;工业检测中的零部件三维尺寸测量等。
服务优势体现在:采用国际主流处理软件与自研算法相结合的技术路线;拥有多年项目经验的专家团队提供技术支持;严格的质量控制流程确保数据精度;可根据客户需求提供从数据采集到成果交付的全流程服务。
我们深知点云数据处理的质量直接影响最终应用效果,因此始终坚持以客户需求为导向,提供定制化、专业化的数据处理服务,助力各行业实现三维数字化转型升级。
如若转载,请注明出处:http://www.baolaiyaotong.com/product/19.html
更新时间:2026-01-13 10:02:35